(画像はイメージです)
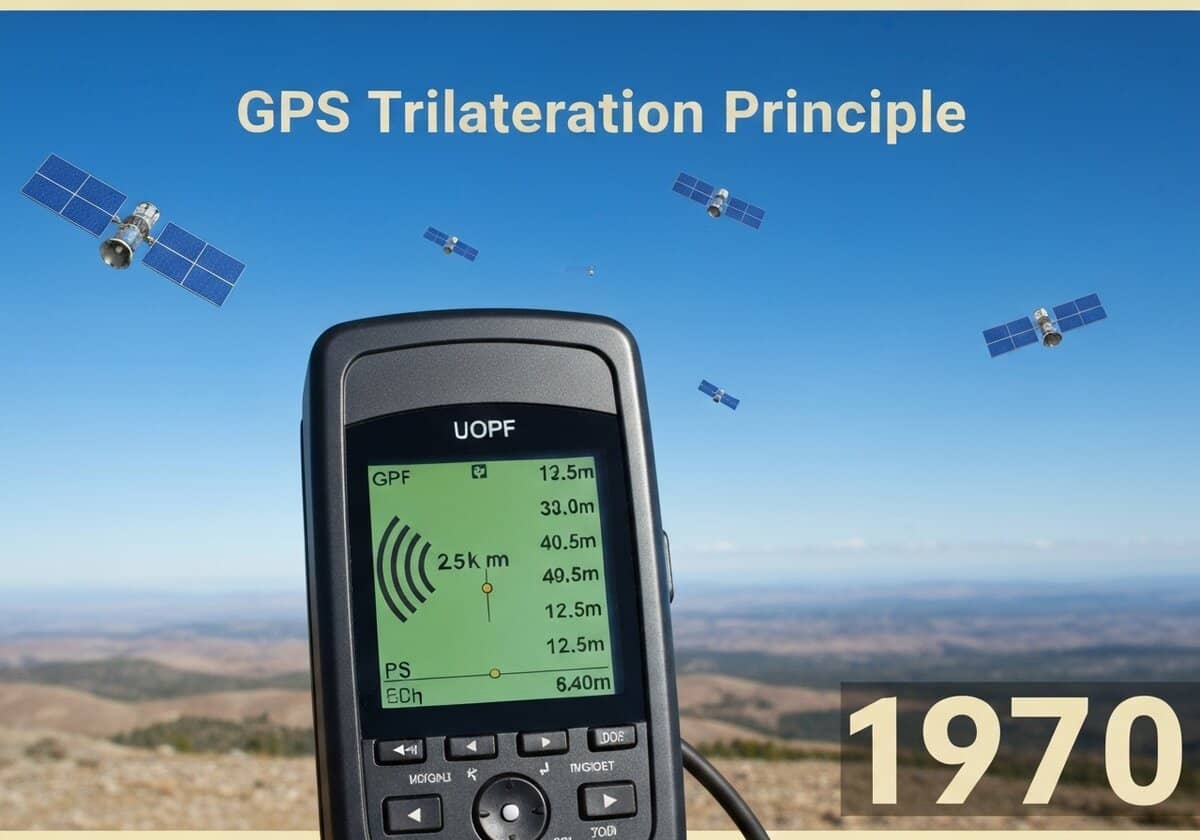
GPSは三辺測量を用いて受信機の位置を特定します。少なくとも3つの衛星までの距離を測定することで、受信機は地球表面上の位置を正確に特定できます。この距離は、信号の伝搬時間に光速を掛けることで計算されます。受信機の時計を同期させ、緯度、経度、高度、時刻という4つの未知数を求めるには、4つ目の衛星が必要です。
GPS測位の基本原理は、三辺測量、より正確には多辺測量と呼ばれる幾何学的手法に基づいています。各GPS衛星は、正確な軌道位置(暦)と信号が送信された正確な時刻を含む信号を継続的に送信します。地球表面上またはその近傍にあるGPS受信機は、複数の衛星からこれらの信号を受信します。受信機は、信号が送信された時刻と受信された時刻の差を計算します。この時間差は飛行時間と呼ばれ、光速(c)を乗じることで、その衛星までの距離、つまり「擬似距離」が求められます。「擬似距離」という用語が使われるのは、受信機の内部時計が衛星に搭載された高精度原子時計と完全に同期していないため、時間オフセット誤差が生じるからです。
幾何学的に、1 つの衛星までの距離がわかっている場合、受信機の位置は、その衛星を中心とする半径が計算された擬似距離に等しい球の表面内に限定されます。2 番目の衛星では、位置は 2 つの球の交点、つまり円に絞り込まれます。3 番目の衛星からの信号は 3 番目の球を提供し、最初の 2 つの衛星からの円との交点によって 2 つの可能な点が得られます。通常、これらの点の 1 つは意味のない場所 (たとえば、宇宙のはるか遠くまたは地球の奥深く) であり、受信機は 2 次元の位置 (緯度と経度) を決定できます。4 番目の未知数である高度を解くため、そしてより重要なことに、受信機のクロック誤差 ([latex]Delta t_{receiver}[/latex]) を補正するために、4 番目の衛星からの信号が必要です。これにより、受信機は4つの未知数([latex]x、y、z、Delta t_{receiver}[/latex])に関する4つの方程式の連立方程式を解くことができ、正確な3D位置と正確な時間が得られます。
ボットによるトラフィック(現在1日あたり4万件以上)を排除するため、このコンテンツはコミュニティメンバー限定となっています。> ログイン < または > 登録 < (100%無料)でこれにアクセスできます。他のすべての制限付きコンテンツとツールも同様です。
相補型金属酸化膜半導体(CMOS)
CMOS(相補型金属酸化膜半導体)は、集積回路を構築するための主要な技術です。p型とn型のMOSFETの相補的なペアを用いて論理ゲートを構成します。その最大の利点は、静的消費電力が非常に低いことです。これは、ペアのトランジスタのうち一方が常にオフ状態であるため、スイッチング遷移時を除いて電流の流れが最小限に抑えられるためです。
カラーテレビ用ユーロピウム蛍光体
ユーロピウムをドープしたバナジン酸イットリウム([latex]YVO_4:Eu^{3+}[/latex])が鮮やかな赤色蛍光体として機能することが発見されたことは、カラーテレビにとって画期的な出来事でした。それまでは、赤色蛍光体は発光が弱く、色がくすんでいました。[latex]Eu^{3+}[/latex]イオンからの強烈で狭帯域の赤色発光により、明るく鮮やかなカラー表示が可能になり、カラーテレビの画質が劇的に向上し、ディスプレイ技術の標準となりました。
ベジェ曲線
1960年代にフランス人エンジニアのピエール・ベジエがルノーのために開発したUNISURFは、最初の本格的な3D CAD/CAMシステムの一つでした。その核心的な革新は、現在ベジ曲線およびベジ曲面として知られるものの使用でした。これらは一連の制御点によって定義されるパラメトリック曲線であり、自動車ボディの複雑な自由曲面形状を直感的かつ数学的に作成することを可能にします。
GPS三辺測量の原理
超伝導磁気エネルギー貯蔵(SMES)
超伝導磁気エネルギー貯蔵(SMES)システムは、超伝導コイルに直流電流を流すことで発生する磁場にエネルギーを蓄積します。コイルが超伝導温度に保たれている限り、電気抵抗によるエネルギー損失がほとんどないため、エネルギーは無期限に蓄積できます。蓄積されるエネルギーは、[latex]E = frac{1}{2} LI^2[/latex]で与えられます。
ガンツ・グリーサー白色度指数
ガンツ・グリーサー白色度指数は、特に繊維産業で広く使用されている線形式です。これはCIE三刺激値から導出され、[latex]W_{GG} = Y - Px - Qy + C[/latex]と定義されます。ここで、P、Q、Cは光源と観察者に固有の定数です。D65/10°条件の場合、式は[latex]W_{GG} = Y - 1868.322x - 3695.690y + 1809.441[/latex]となります。
リチウムイオンのインターカレーション機構
リチウムイオン電池は、層状ホスト材料へのイオンの可逆的な挿入であるインターカレーション機構によって機能します。放電中、リチウムイオン(Li⁺)は負極(アノード、通常はグラファイト)から脱インターカレーションされ、非水系電解質を通って正極(カソード、通常は金属酸化物)に挿入されます。電子は外部回路を移動し、電流を生成します。
Qスイッチング(レーザー)
Qスイッチングは、高強度で短パルスのレーザー光を生成する技術です。この技術は、レーザー発振を一時的に停止させることで、利得媒体に反転分布による大量のエネルギーを蓄積させます。その後、レーザーの品質係数(Q値)を急速に高い値に切り替えることで、蓄積されたエネルギーを強力なナノ秒パルスとして放出します。
CIE Dシリーズ光源
CIE Dシリーズ光源は、自然光の様々な段階を表す一連の標準スペクトルパワー分布(SPD)です。最も一般的なのはD65で、相関色温度は約6504Kであり、正午の平均的な昼光を表します。D50(5003K)も重要な標準であり、グラフィックアートでよく使用されます。これらの標準により、一貫した色再現が可能になります。
モード同期(レーザー)
モード同期は、ピコ秒(10⁻¹²秒)からフェムト秒(10⁻¹⁵秒)オーダーの極めて短いレーザーパルスを生成する技術です。この技術は、レーザー共振器内の多数の縦モードを一定の位相関係で振動させることによって機能します。これにより、モードが建設的に干渉し、共振器内を循環する単一の強力な超短パルスが生成されます。
トップダウン型ナノ材料合成
トップダウン合成とは、より大きなバルク材料を出発点として、それをナノスケールまで分解またはパターン化することでナノ材料を作製する手法です。主な技術としては、ボールミルなどの機械的方法や、フォトリソグラフィー、電子ビームリソグラフィー、ナノインプリントリソグラフィーなどのリソグラフィー法が挙げられます。これらの方法は、構造化された表面や集積回路の作製によく用いられますが、表面に欠陥が生じる可能性があります。
フライホイールエネルギー貯蔵(FES)
フライホイールエネルギー貯蔵(FES)は、ローター(フライホイール)を非常に高速に加速し、回転運動エネルギーとしてシステム内にエネルギーを維持することによって機能します。蓄積されるエネルギーは、回転速度の二乗に比例します。エネルギーが取り出されると、フライホイールの回転は減速します。蓄積エネルギーの式は、[latex]E = frac{1}{2} I omega^2[/latex]で、Iは慣性モーメント、ωは角速度です。
分子エレクトロニクス
分子エレクトロニクスは、個々の分子またはナノスケールの分子集合体を基本的な電子部品として利用する研究分野です。このアプローチは、従来のシリコンベースの技術をはるかに超える、究極の小型化を実現した回路の構築を目指しています。主要な構成要素には、分子ワイヤー、スイッチ、整流器などがあり、分子軌道を介した電子トンネル効果といった量子力学的特性を利用して機能します。
故障の物理学(PoF)
故障物理学(PoF)は、材料科学と物理学の知識を用いて故障の根本原因メカニズムを理解し、モデル化する信頼性工学のアプローチです。過去の故障に関する統計データだけに頼るのではなく、劣化や破壊につながる物理的プロセス(疲労、腐食、クリープなど)を分析することで、故障を予測することに重点を置いています。
ナノ材料における量子サイズ効果
量子サイズ効果とは、物質のサイズがナノスケールに近づくにつれて、その電子特性や光学特性が変化する現象を指します。物質の寸法が電子のド・ブロイ波長に匹敵するようになると、量子閉じ込めが発生します。これにより電子のエネルギー準位が量子化され、サイズに依存するバンドギャップが生じます。[latex]E_g(R) approx E_{g,bulk} + frac{hbar^2pi^2}{2R^2}(frac{1}{m_e^*} + frac{1}{m_h^*})[/latex]。
(日付が不明または関連性がない場合、例えば「流体力学」などでは、その注目すべき出現時期の概算値が提示されます。)
フルサイズの画像とダウンロードは、登録会員のみが100%無料で利用できます。
> ログイン <