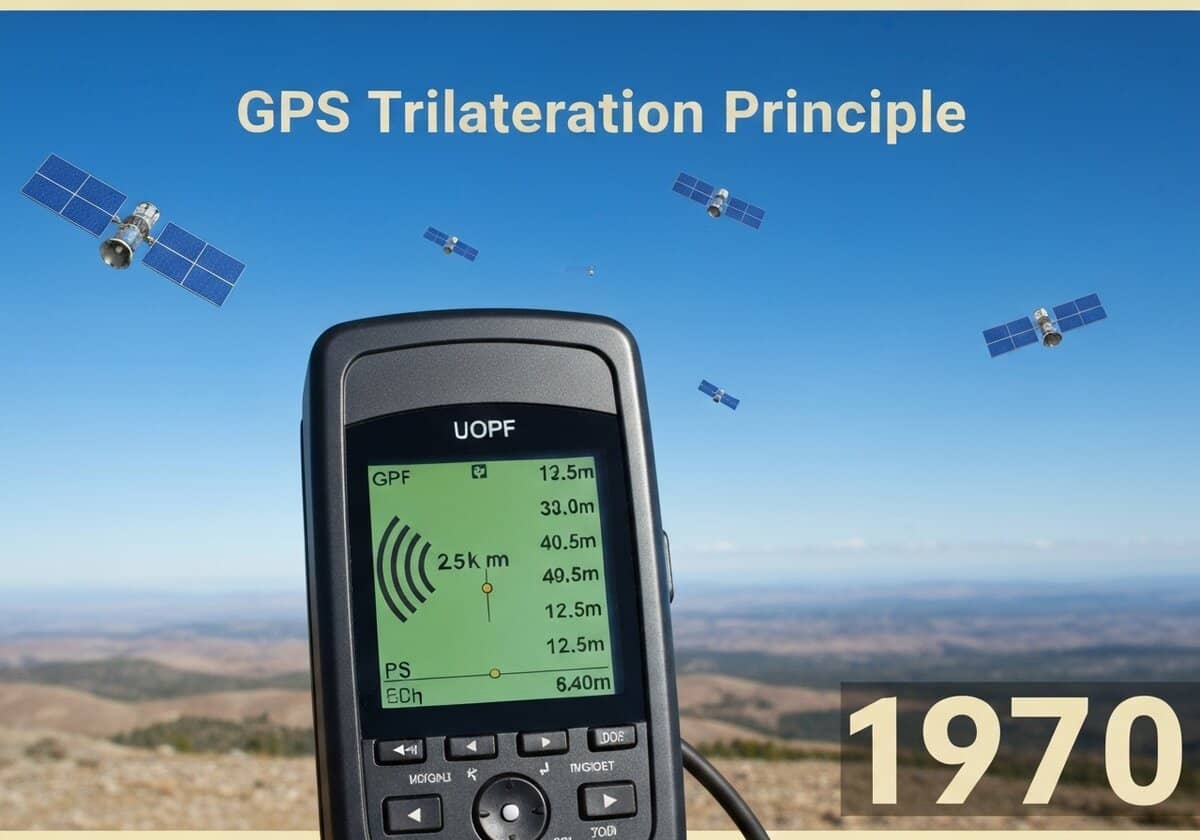
GPS-Trilaterationsprinzip
Das GPS ermittelt die Position eines Empfängers mittels Trilateration. Durch Messung der Entfernung zu mindestens drei Satelliten kann der Empfänger seinen Standort auf der Erdoberfläche genau bestimmen. Die Entfernung wird berechnet, indem die Laufzeit des Signals mit der Lichtgeschwindigkeit multipliziert wird. Ein vierter Satellit ist erforderlich, um die Uhr des Empfängers zu synchronisieren und so die vier unbekannten Größen – Breitengrad, Längengrad, Höhe und Zeit – zu bestimmen.
Das Kernprinzip der GPS-Positionierung basiert auf einem geometrischen Verfahren namens Trilateration, genauer Multilateration. Jeder GPS-Satellit sendet kontinuierlich ein Signal, das seine genaue Position auf der Umlaufbahn (Ephemeride) und den exakten Sendezeitpunkt enthält. Ein GPS-Empfänger auf oder nahe der Erdoberfläche empfängt diese Signale von mehreren Satelliten. Der Empfänger berechnet die Zeitdifferenz zwischen Senden und Empfangen des Signals. Diese Zeitdifferenz, die sogenannte Laufzeit, wird mit der Lichtgeschwindigkeit (c) multipliziert, um die Entfernung, die sogenannte Pseudostrecke, zu diesem Satelliten zu bestimmen. Der Begriff „Pseudostrecke“ wird verwendet, da die interne Uhr des Empfängers nicht perfekt mit den hochpräzisen Atomuhren der Satelliten synchronisiert ist, was zu einem Zeitversatz führt.
Geometrisch betrachtet, beschränkt die Kenntnis der Entfernung zu einem Satelliten die Position des Empfängers auf die Oberfläche einer Kugel mit Mittelpunkt um diesen Satelliten und einem Radius entsprechend der berechneten Pseudostrecke. Mit einem zweiten Satelliten wird die Position auf den Schnittpunkt zweier Kugeln, also einen Kreis, eingegrenzt. Das Signal eines dritten Satelliten liefert eine dritte Kugel, deren Schnittpunkt mit dem Kreis der ersten beiden Satelliten zwei mögliche Punkte ergibt. Typischerweise ist einer dieser Punkte ein sinnloser Ort (z. B. weit draußen im Weltraum oder tief im Erdinneren), sodass der Empfänger seine 2D-Position (Breiten- und Längengrad) bestimmen kann. Um die vierte Unbekannte, die Höhe, zu berechnen und, was noch wichtiger ist, den Taktfehler des Empfängers (ΔtEmpfänger) zu korrigieren, ist ein Signal von einem vierten Satelliten erforderlich. Dies ermöglicht es dem Empfänger, ein System von vier Gleichungen für vier Unbekannte ([latex]x, y, z, Delta t_{receiver}[/latex]) zu lösen, wodurch eine präzise 3D-Position und eine genaue Zeitangabe gewonnen werden.
UNESCO Nomenclature: 2212
‚Radiowellenphysik‘
Verwendung
Weitverbreitete Verwendung
Vorläufer
- Astronavigation
- Funkpeilung (RDF)
- Langstreckennavigationssystem (LORAN)
- Transit-Satellitensystem (Navsat)
- Grundprinzipien der Geometrie und Trigonometrie
- Messung der Lichtgeschwindigkeit
Anwendungen
- Fahrzeugnavigationssysteme
- Geotagging von Fotos
- Präzisionslandwirtschaft
- Katastrophenschutz und Notfalldienste
- standortbasierte Dienste auf Smartphones
Potenzielle Innovationsideen
Aufgrund des hohen Datenverkehrs durch Web-Scraping-Bots, der derzeit mehr als 40.000 Anfragen pro Tag umfasst, ist dieser Inhalt ausschließlich Community-Mitgliedern vorbehalten.
> Anmelden < oder > Registrieren < (100% kostenlos) Zugriff darauf sowie auf alle anderen eingeschränkten Inhalte und Tools.
Verwandt mit: Trilateration, Multilateration, Pseudostrecke, Satellitenentfernungsmessung, Laufzeit, GPS-Positionierung, Navigation, Geometrie, Lichtgeschwindigkeit, Zeitversatz.