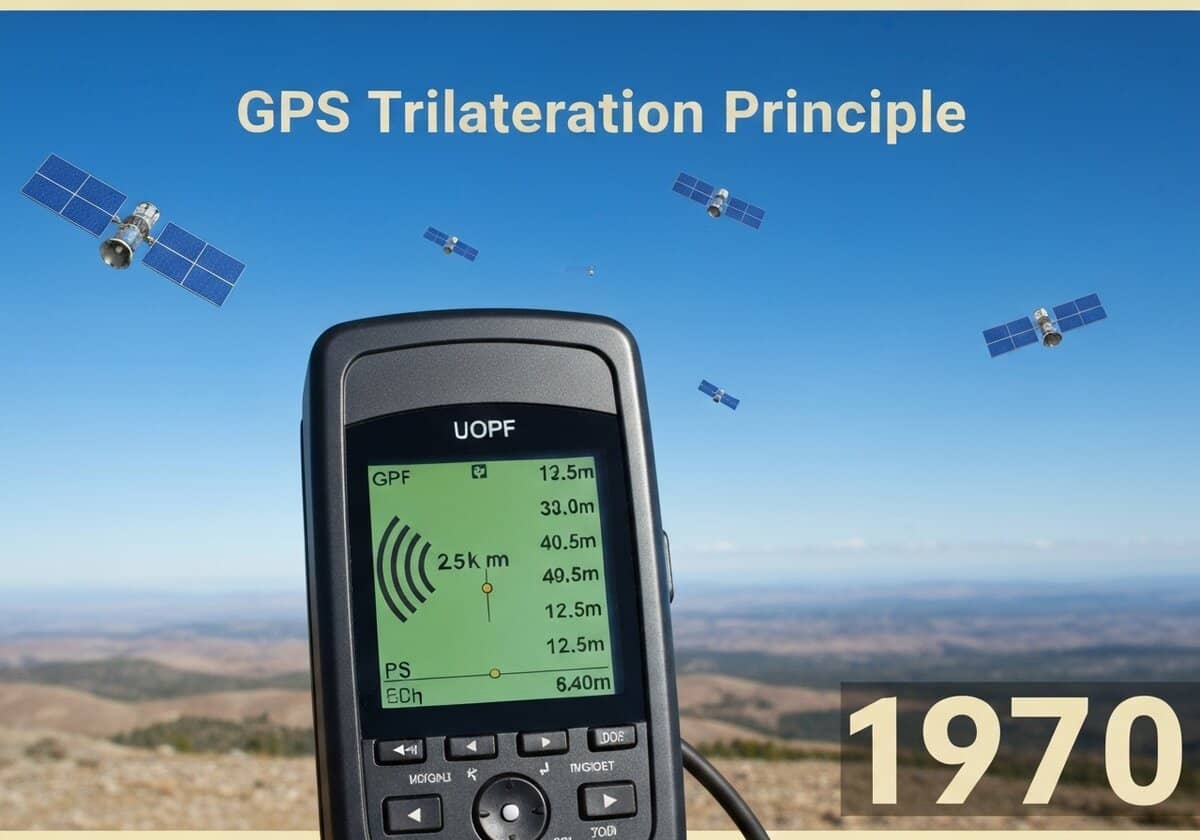
The GPS determines a receiver’s position using trilateration. By measuring the distance to at least three satellites, the receiver can pinpoint its location on Earth’s surface. The distance is calculated by multiplying the signal’s travel time by the speed of light. A fourth satellite is required to synchronize the receiver’s clock, resolving for the four unknowns: latitude, longitude, altitude, and time.
The core principle of GPS positioning is based on a geometric technique called trilateration, or more accurately, multilateration. Each GPS satellite continuously broadcasts a signal that includes its precise orbital position (ephemeris) and the exact time the signal was transmitted. A GPS receiver on or near the Earth’s surface picks up these signals from multiple satellites. The receiver calculates the time difference between when the signal was sent and when it was received. This time difference, known as the time of flight, is then multiplied by the speed of light ([乳胶]c[/latex]) to determine the distance, or ‘pseudorange’, to that satellite. The term ‘pseudorange’ is used because the receiver’s internal clock is not perfectly synchronized with the highly accurate atomic clocks on the satellites, introducing a time offset error.
Geometrically, knowing the distance to one satellite confines the receiver’s position to the surface of a sphere centered on that satellite with a radius equal to the calculated pseudorange. With a second satellite, the position is narrowed down to the intersection of two spheres, which is a circle. A third satellite’s signal provides a third sphere, and its intersection with the circle from the first two satellites results in two possible points. Typically, one of these points is a nonsensical location (e.g., far out in space or deep inside the Earth), allowing the receiver to determine its 2D position (latitude and longitude). To solve for the fourth unknown, altitude, and more importantly, to correct for the receiver’s clock error ([latex]\Delta t_{receiver}[/latex]), a signal from a fourth satellite is necessary. This allows the receiver to solve a system of four equations for four unknowns ([latex]x, y, z, \Delta t_{receiver}[/latex]), yielding a precise 3D position and accurate time.