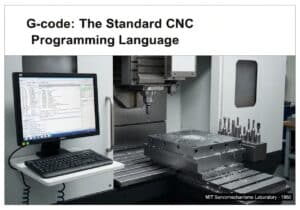
Interpolation de mouvement CNC
L'interpolation est le processus de calcul au sein d'une commande CNC qui génère une séquence de points de coordonnées intermédiaires pour créer une trajectoire fluide entre des points finaux programmés. Les types les plus fondamentaux sont l'interpolation linéaire (G01) pour les lignes droites et l'interpolation circulaire (G02/G03) pour les arcs. Cela permet d'usiner des profils complexes à partir de commandes géométriques simples dans l'interface utilisateur. Code G programme.
L'interpolateur est le cœur mathématique d'un contrôleur CNC. Sans lui, une machine ne pourrait se déplacer d'un point absolu à un autre que de manière désordonnée, ‘point à point’. L'interpolateur permet le ‘contournage’, ou contrôle continu de la trajectoire, qui est essentiel pour tout usinage moderne. Lorsque le contrôleur lit un bloc de code G tel que ‘G01 X10 Y20’, il connaît la position actuelle (par exemple, X0 Y0) et la position cible. Le travail de l'interpolateur consiste à décomposer ce vecteur unique en une série de commandes par étapes très petites et discrètes pour chaque moteur d'axe (par exemple, X et Y). Il calcule la vitesse requise pour chaque axe afin qu'ils démarrent et s'arrêtent simultanément, ce qui permet d'obtenir une ligne parfaitement droite entre les deux points. L'algorithme utilisé est souvent une variante de l'analyseur différentiel numérique (DDA) ou de l'algorithme de la ligne de Bresenham.
Pour l'interpolation circulaire (G02/G03), le calcul est plus complexe. Le G-code fournit le point de départ (position actuelle), le point d'arrivée et le centre du cercle (ou le rayon). L'interpolateur doit ensuite calculer une série de points intermédiaires situés sur l'arc spécifié. Pour ce faire, il résout l'équation du cercle de manière incrémentale et génère des commandes de vitesse coordonnées pour les axes X et Y, maintenant la vitesse tangentielle et la distance radiale correctes. Les contrôleurs CNC avancés proposent des interpolations d'ordre supérieur, telles que l'interpolation hélicoïdale (combinant un mouvement circulaire et un mouvement linéaire sur un troisième axe), spline ou NURBS (Non-Uniform Rational B-Spline). L'interpolation NURBS est particulièrement performante, car elle permet à la machine de suivre des courbes complexes et libres définies par une seule équation mathématique, ce qui produit un mouvement plus fluide et de meilleurs états de surface qu'une approximation de la courbe par de nombreux petits segments linéaires.
UNESCO Nomenclature: 1202
- Mathématiques appliquées
Taper
Logiciel/Algorithme
Perturbation
Fondamentaux
Usage
Utilisation généralisée
Précurseurs
- géométrie des coordonnées (systèmes cartésiens et polaires)
- équations différentielles décrivant le mouvement
- développement du matériel informatique numérique
- méthodes d'analyse numérique comme l'analyseur différentiel numérique (DDA)
Applications
- usinage de surfaces courbes et de géométries complexes
- planification de la trajectoire du bras robotisé
- Génération de chemin de couche d'impression 3D
- soudage automatisé le long de joints non linéaires
- infographie pour le rendu de courbes lisses
- chemins d'inspection et de numérisation automatisés
Idées d'innovations potentielles
En raison du trafic généré par les robots de scraping, actuellement supérieur à 40 000 par jour, ce contenu est réservé aux membres de la communauté.
> Connexion < ou > Registre < (100% gratuit) pour y accéder, ainsi qu'à tous les autres contenus et outils à accès restreint.
Voir aussi : interpolation, cnc, interpolation linéaire, interpolation circulaire, nurbs, parcours d'outils, contrôleur, analyse numérique, dda, contournage.