
يعد استخدام موالف حلقة PID أو منهجيات الضبط المناسبة في عمليات التصنيع أمرًا أساسيًا لـ التحكم الإحصائي في العمليات (SPC) وتحقيق كل من جودة المنتج العالية والكفاءة التشغيلية الاقتصادية. تشير الدراسات إلى أن جزءًا كبيرًا من حلقات التحكم PID في البيئات الصناعية، والتي يقدرها البعض بأكثر من 65%، لا تعمل بشكل جيد، حيث يعمل ما يصل إلى 30% في الوضع اليدوي.
ويسهم هذا التحكم دون المستوى الأمثل بشكل مباشر في زيادة تباين العمليات، وارتفاع معدلات رفض المنتجات، وعدم كفاءة استهلاك الطاقة، وتسارع تآكل المعدات، وكل ذلك يؤثر سلبًا على التكاليف التشغيلية واتساق الإنتاج.
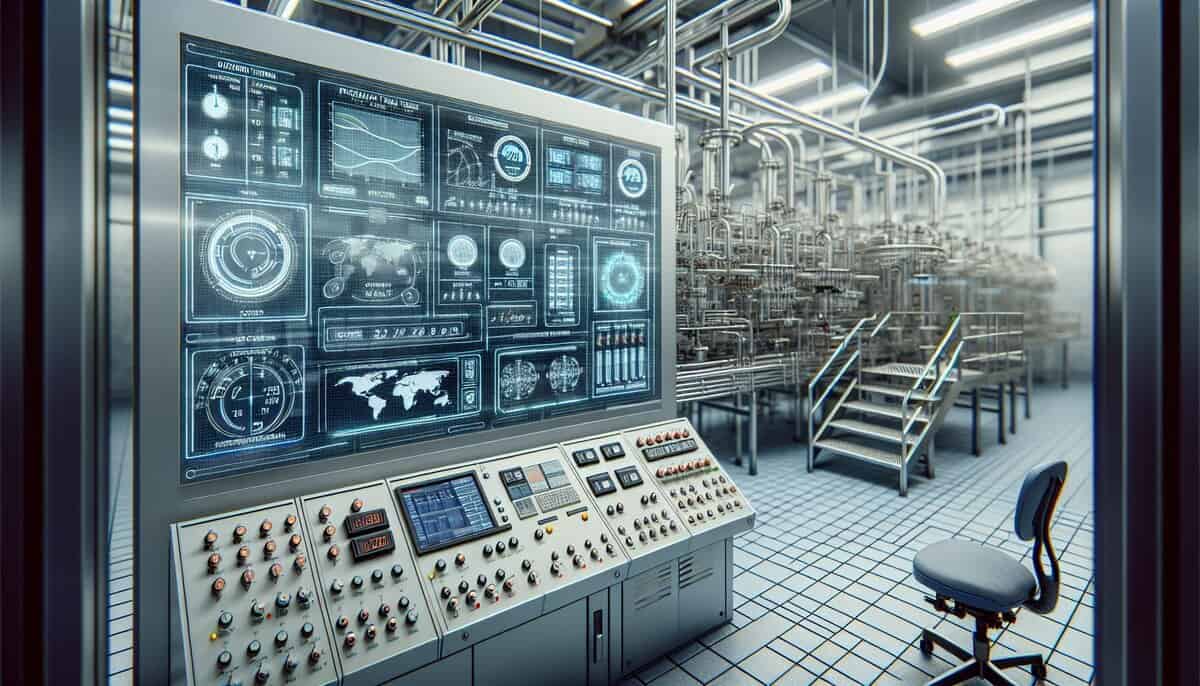
في معالجة الأغذية: تتم إدارة الحفاظ على درجات الحرارة الدقيقة أثناء البسترة بواسطة وحدات تحكم PID لضمان القضاء على البكتيريا الضارة دون تدهور القيمة الغذائية أو السمات الحسية للمنتج، مثل الحليب. يمكن أن تؤدي التباينات في درجة الحرارة بسبب سوء ضبط الحلقات إلى عدم اتساق في القوام والنكهة واستقرار التخزين، أو حتى تشكل مخاطر على السلامة.

أنظمة إدارة معدلات التدفق في خطوط الأنابيب أو ضغط البخار للتدفئة الصناعية: حتى التحسينات الطفيفة في دقة التحكم من الضبط الأمثل يمكن أن تتراكم إلى وفورات كبيرة في الطاقة وخفض تكاليف المرافق.
تشير بعض التحليلات إلى أن أكثر من 30% من حلقات التحكم تُظهر سلوكًا متذبذبًا، وغالبًا ما يكون ذلك بسبب مشاكل في الضبط، مما يساهم بشكل مباشر في زيادة التباين والخسائر الاقتصادية.







أليست توصية طريقة ضبط PID الموصى بها مجرد إعادة اختراع العجلة؟ أليست هناك طرق أبسط موجودة بالفعل؟
الذكاء الاصطناعي ليس الحل السحري للجميع. في بعض الأحيان، يفوز PID الكلاسيكي. لا تصلح ما لا ينكسر!
منشورات ذات صلة
أحدث المنشورات وبراءات الاختراع حول الأطر المعدنية العضوية (MOFs)
أحدث المنشورات وبراءات الاختراع حول الأطر العضوية التساهمية (COFs)
أحدث المنشورات وبراءات الاختراع حول الهلام الهوائي والجرافين الهوائي
أحدث المنشورات وبراءات الاختراع حول الأكاسيد عالية الإنتروبيا (HEOs)
أحدث المنشورات وبراءات الاختراع على MXenes
أحدث المنشورات وبراءات الاختراع حول النقاط الكمية