(画像はイメージです)
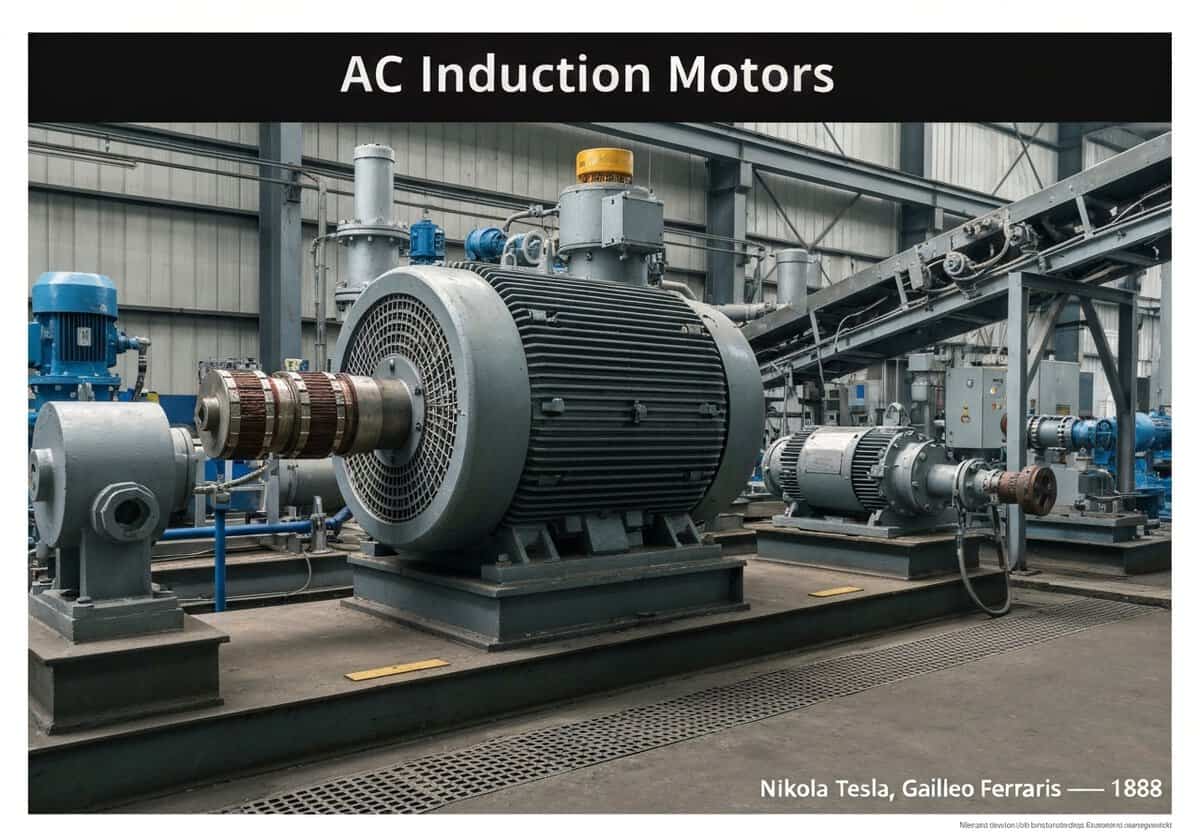
交流誘導 モーター ステータによって生成される回転磁場の原理に基づいて動作します。この磁場は、空間的に分散配置されたステータ巻線に多相交流電流を供給することによって生成されます。回転磁場は回転子導体(例えば、かご形コイル)に電流を誘導し、それによって逆向きの磁場が生成されます。これらの磁場の相互作用によって回転トルクが発生します。
交流誘導電動機の優れた点は、回転子に電気的な接続を一切必要とせずに運動を生み出すことができるため、シンプルで頑丈かつ信頼性が高いことです。その鍵となる概念は、回転磁界です。一般的な三相電動機では、固定子には物理的に 120 度ずらされた 3 組の巻線があります。これらが三相交流電源 (各相の電圧も時間的に 120 度ずらされている) によって励磁されると、結果として生じる磁界は一定の大きさを持ちながら一定の速度で回転します。この速度は同期速度 ([latex]N_s = 120f / P[/latex]、ここで f は電源周波数、P は極数) と呼ばれます。
この回転する固定子磁界は、回転子の導体バーを掃引します。ファラデーの誘導法則により、この相対運動によって短絡された回転子バーに電圧、ひいては大きな電流が誘導されます。この誘導電流は回転子に独自の磁場を生成します。レンツの法則によれば、回転子磁界はそれを引き起こした変化に抵抗するため、固定子磁界に引きずられることになります。トルクを発生させるには、回転子は同期速度よりもわずかに遅く回転する必要があります。この速度差は「滑り」と呼ばれます。滑りによって、固定子磁界は回転子導体を「切断」し続け、電流を誘導することができるのです。
ボットによるトラフィック(現在1日あたり4万件以上)を排除するため、このコンテンツはコミュニティメンバー限定となっています。> ログイン < または > 登録 < (100%無料)でこれにアクセスできます。他のすべての制限付きコンテンツとツールも同様です。
レイノルズ数
レイノルズ数([latex]text{Re}[/latex])は、流体力学において慣性力と粘性力の比を表すことで流れのパターンを予測するために用いられる無次元量です。レイノルズ数が低いほど滑らかで秩序だった層流を示し、レイノルズ数が高いほど混沌とした渦の多い乱流を示します。レイノルズ数は、流体の動的挙動を決定したり、実験のスケールアップを行う上で非常に重要です。
電磁運動量
電磁場は運動量を運ぶことができる。電磁場の運動量密度は、ポインティングベクトル[latex]vec{S}[/latex]を光速の2乗で割った値、[latex]vec{g} = vec{S}/c^2 = (vec{E} times vec{B})/(mu_0 c^2)[/latex]で与えられる。荷電粒子と場の系で運動量が保存されるためには、粒子の力学的運動量に加えて、場の運動量も考慮に入れなければならない。
マッハ数と圧縮率
マッハ数(M)は、境界を通過する流速と局所的な音速の比を表す無次元量です。[latex]M = v/a[/latex]、ここでvは流速、aは音速です。これは圧縮性効果の主要な指標です。マッハ数が1に近づき、それを超えると、空気の密度が大きく変化し、空力特性が変化します。
交流誘導電動機
燃料電池の電位に関するネルンストの式
ネルンストの式は、非標準条件下における燃料電池の可逆起電力(EMF)または開回路電圧を定量化します。この式は、セル電位([latex]E[/latex])を標準電位([latex]E^0[/latex])、温度、および反応物と生成物の活量(分圧で近似)に関連付けます。式は[latex]E = E^0 - frac{RT}{nF} ln Q[/latex]で、Qは反応商です。
運動起電力
導体が磁場を通過すると、運動起電力が発生します。ローレンツ力の磁気成分、[latex]mathbf{F} = q(mathbf{v} times mathbf{B})[/latex] は、導体内の電荷キャリアに作用し、電荷キャリアを移動させて電荷分離を引き起こします。この分離によって電場と電位差が生じます。結果として生じる起電力は、線積分 [latex]mathcal{E} = oint (mathbf{v} times mathbf{B}) cdot dmathbf{l}[/latex] で与えられます。
液液抽出液における分配比
分配比(D)は、液液抽出(LLE)における重要な平衡パラメータであり、有機相中の溶質の総分析濃度を水相中の溶質の総濃度で割った値として定義されます。[latex]D = frac{[S]_{org,total}}{[S]_{aq,total}}[/latex]。分配係数(K_D)とは異なり、Dは解離型や錯体型を含む溶質のすべての化学種を考慮するため、pHに依存します。
3D応力に対するモール円
一般的な三次元応力状態の場合、解析は3つのモール円で表されます。これらの円は、3つの主応力([latex]sigma_1、sigma_2、sigma_3[/latex])を直径として、[latex]sigma_n - tau_n[/latex]平面上に描かれます。最大の円は、[latex]sigma_1[/latex]と[latex]sigma_3[/latex]で定義され、他の2つの円を囲み、絶対最大せん断応力[latex]tau_{abs max} = (sigma_1 - sigma_3)/2[/latex]を決定します。
ルシャトリエの動的平衡の原理
せん断増粘(ダイラタンシー)
せん断増粘、またはダイラタンシーとは、せん断応力の速度に応じて粘度が増加する非ニュートン流体挙動のことである。典型的な例は、コーンスターチを水に懸濁させたもの(ウーブレック)である。これはゆっくりかき混ぜると液体のように感じられるが、叩いたり速くかき混ぜたりするとほぼ固体になる。この現象は、高せん断下で懸濁粒子が詰まることによって引き起こされる。
理想溶液に関するラウールの法則
ネルンストの式
ネルンストの式は、半電池の還元電位(または電気化学セルの全電圧)を、標準電極電位、温度、および酸化還元反応を起こす化学種の活量(多くの場合、濃度で近似される)に関連付けます。この式は [latex]E = E^{circ} - frac{RT}{nF} ln Q[/latex] で、Q は反応商です。
化学起電力
電池や燃料電池などの電気化学セルでは、起電力は化学反応によって発生します。電荷の分離は、2つの異なる電極で起こる酸化還元反応によって駆動されます。セルの最大起電力は、反応のギブズ自由エネルギーの変化([latex]Delta G[/latex])と[latex]mathcal{E} = -frac{Delta G}{nF}[/latex]の関係にあります。ここで、[latex]n[/latex]は電子のモル数、[latex]F[/latex]はファラデー定数です。
化学発光
化学発光とは、化学反応の結果として光(発光)が放出される現象です。励起状態の中間体([Product]*と表記される。アスタリスクはしばしばこの中間体を表すのに用いられる)が形成されます。この中間体はその後、より低いエネルギーの基底状態に遷移し、光子の形でエネルギーを放出します。全体のプロセスは、[latex]A + B rightarrow [Product]* rightarrow Product + light[/latex]と表すことができます。
レイノルズ平均ナビエ・ストークス(RANS)方程式
レイノルズ平均ナビエ・ストークス(RANS)方程式は、乱流流体の流れを時間平均した運動方程式です。レイノルズ分解と呼ばれるこの手法では、流れの変数を平均成分と変動成分に分離します。平均化処理によって、乱流の影響を表すレイノルズ応力テンソルという項が追加されます。この応力テンソルをモデル化することで、シミュレーションの計算処理が容易になり、方程式の整合性が確保されます。
(日付が不明または関連性がない場合、例えば「流体力学」などでは、その注目すべき出現時期の概算値が提示されます。)
フルサイズの画像とダウンロードは、登録会員のみが100%無料で利用できます。
> ログイン <