GPS는 삼각측량법을 사용하여 수신기의 위치를 결정합니다. 최소 세 개의 위성까지의 거리를 측정함으로써 수신기는 지구 표면에서의 정확한 위치를 파악할 수 있습니다. 거리는 신호의 이동 시간에 빛의 속도를 곱하여 계산됩니다. 네 번째 위성은 수신기의 시계를 동기화하고 위도, 경도, 고도, 시간이라는 네 가지 미지수를 결정하는 데 필요합니다.








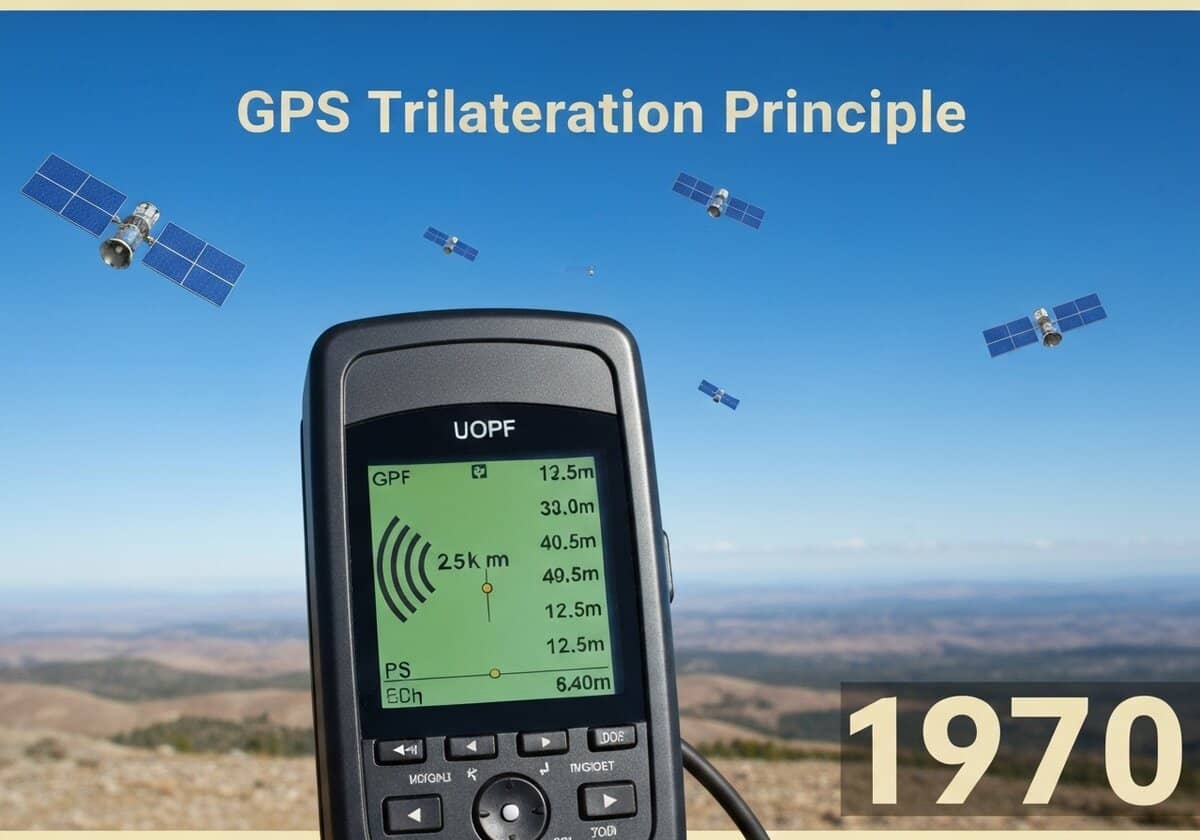
GPS 삼각측량 원리
(날짜를 알 수 없거나 관련이 없는 경우, 예를 들어 "유체역학"의 경우, 주목할 만한 등장 시기를 대략적으로 추정하여 제공합니다.)